Constraints
While degrees of freedom are added in the Bodies section, they are reduced in the Constraints section. Constraints are used for the idealized representation of joints and connections between bodies and define the kinematics of a system. principia MBS lists all constraints with their name on the left and the involved bodies on the right:

To save you time and effort, we thought of reusing the connections already defined in Onshape. Following mates are identified by principia MBS and automatically taken over into the app:
![]()
In the current version of principia MBS the tangent mate cannot be reused. The same applies for relations (gear, rack and pinion, screw, linear).
principia MBS allows to override the preset lockings of degrees of freedom between two bodies. In order to lock or unlock, you may use the checkboxes visible when opening a constraint. DX, DY, DZ refer to translational lockings along X-, Y-, Z- direction. AX, AY, AZ refer to rotational lockings around the X-, Y-, Z- axis.
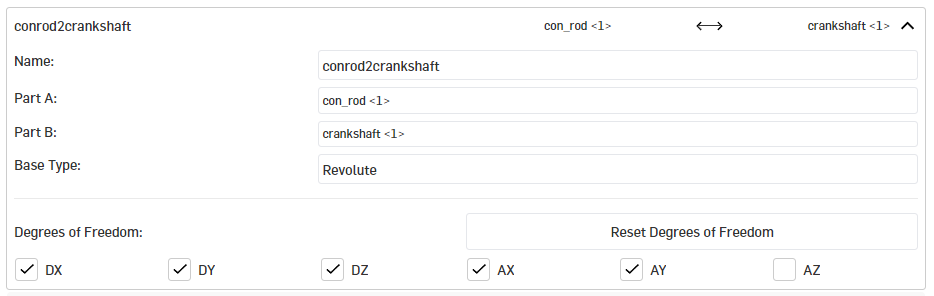
In the image below we locked the AZ degree of freedom, which means the revolute mate in Onshape was changed to a fastened mate in principia MBS. The override is highlighted with the blue vertical line next to the according constraint. You can also disable a constraint by unchecking all the checkboxes.
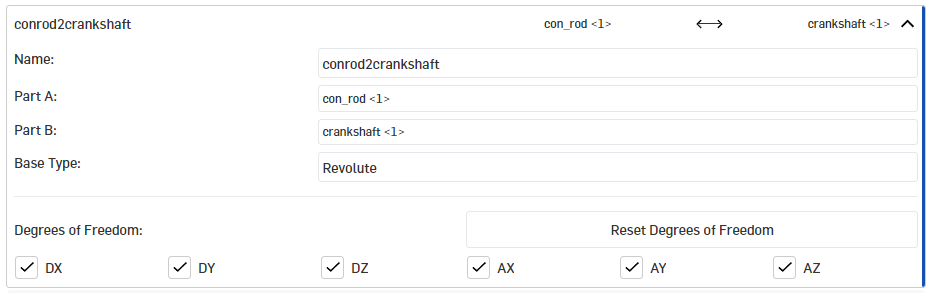
If you wish to reset the overrides, hit the Reset Degrees of Freedom button.
Overrides are stored in the principia MBS model and are associative with any update in your Onshape model. Changing the mate type in your Onshape model does not change the principia MBS constraint as long as there is an active override.
The sequence is important!
All lockings are refered to directions (DX, DY, DZ, AX, AY, AZ). These alignments refer to the primary body, i.e. the body to the left of the connecting arrow in the list.
Translational lockings (DX, DY, DZ) prohibit relative translational motion of both respective bodies along the given direction. Wheras this direction is rotating with the first body.
Similarly, rotational lockings (AX, AY, AZ) prevent any relative rotation of both bodies around the given axis.