Servo Motor Force
This force element applies a torque vector acting from the reaction body onto the action body. The torque amplitude is computed such, that the behaviour mimics a servo motor. The torque axis is fixed with Action Mate Connector and you may choose between X, Y, or Z axis of the according mate connector. The servo motor aims to prescribe a rotational shaft motion starting at the current angle at and ending after the Motion Duration at the desired End Position. To show a saturating behavior when a certain Maximum Torque is exceeded, you can also specify a meaningful value for it.
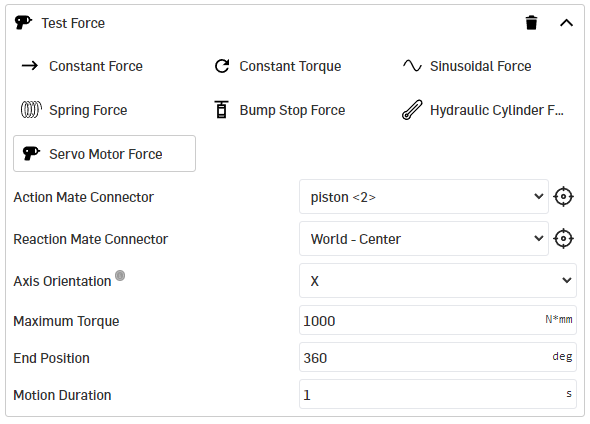
Action Mate Connector
Specify a mate connector to define the body and exact point on which the torque is applied.
Reaction Mate Connector
Specify a mate connector to define the body and exact point on which the reaction torque is applied.
Axis Orientation
Defines the axis orientation of the torque. Refers to the directions of the action mate connector.
Maximum Torque
Defines the torque limit of the servo motor. This may correlate with the maximum torque of a servo drive, or when a gearbox is in action, this value multiplied with a gear ratio. Provide a value in the units you selected for Force times Length.
End Position
The desired angle of the servo motor. Provide a value in the unit you selected for Angle.
Motion Duration
The duration specifies the function used as the desired trajectory from the start of the motion to the stationary end position. The time unit is set to seconds.
principia MBS auto-generates a smooth trajectory from current to desired shaft angle. A ninth order polynomial is used to avoid unphysical accelerations.
Test this element starting with zero damping!
After a successful test, you can then increase the value for the damping so that the desired behavior is achieved.